简介
与状态空间模型不同,输入输出模型直接将系统的输入和输出联系起来,而无需通过状态方程描述内部结构,通常将系统视为一个黑箱。输入输出稳定性关注输入与输出之间的关系,而Lyapunov稳定性则着重于系统状态的演变。
稳定性
考虑输入输出关系由如下方程描述的系统
其中,是一个映射或者算子。输入属于一个信号空间,该信号空间中的信号是个函数,将时间区间映射到欧氏空间。引入范数来描述信号的大小。接着便为、和函数空间定义范数。为了与作为中向量的范数区别开来,用表示作为函数空间中函数的范数。的定义基于,但要将它们与在欧氏空间中的几种范数、、区别开来。
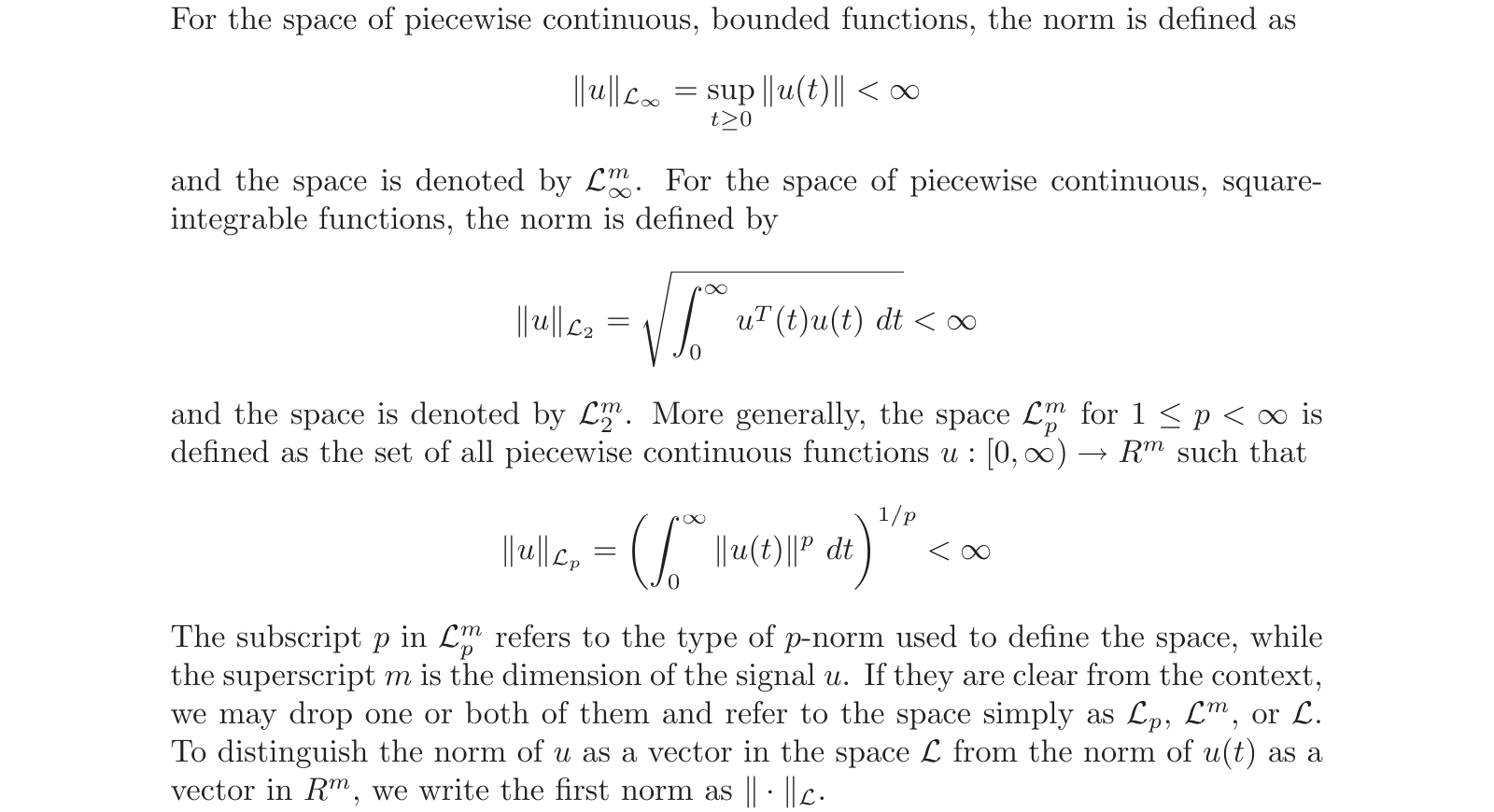 不同函数空间的范数
不同函数空间的范数
按照上述记号规则,可以将定义为从到的映射。但这种定义方式并不合适,因为需要考虑不稳定系统。对于不稳定系统,输入可能导致输出不属于。因此,通常定义为从扩展空间到扩展空间的映射,扩展空间定义为
其中,是的截断函数,定义为
这种截断方式要求空间中的函数,即使在无限时域上可能无界,也必须在每个有限时间段内表现得如同空间中的函数一样。因此,是的子集。
映射被称为因果映射,如果在任意时间的输出只依赖于输入在时刻及之前的值。因果性(causality)是由状态空间模型表示的动态系统的内在特性,它的定义等价于
有了输入输出信号空间的定义,便可以定义输入输出稳定性(input-output
stability)。
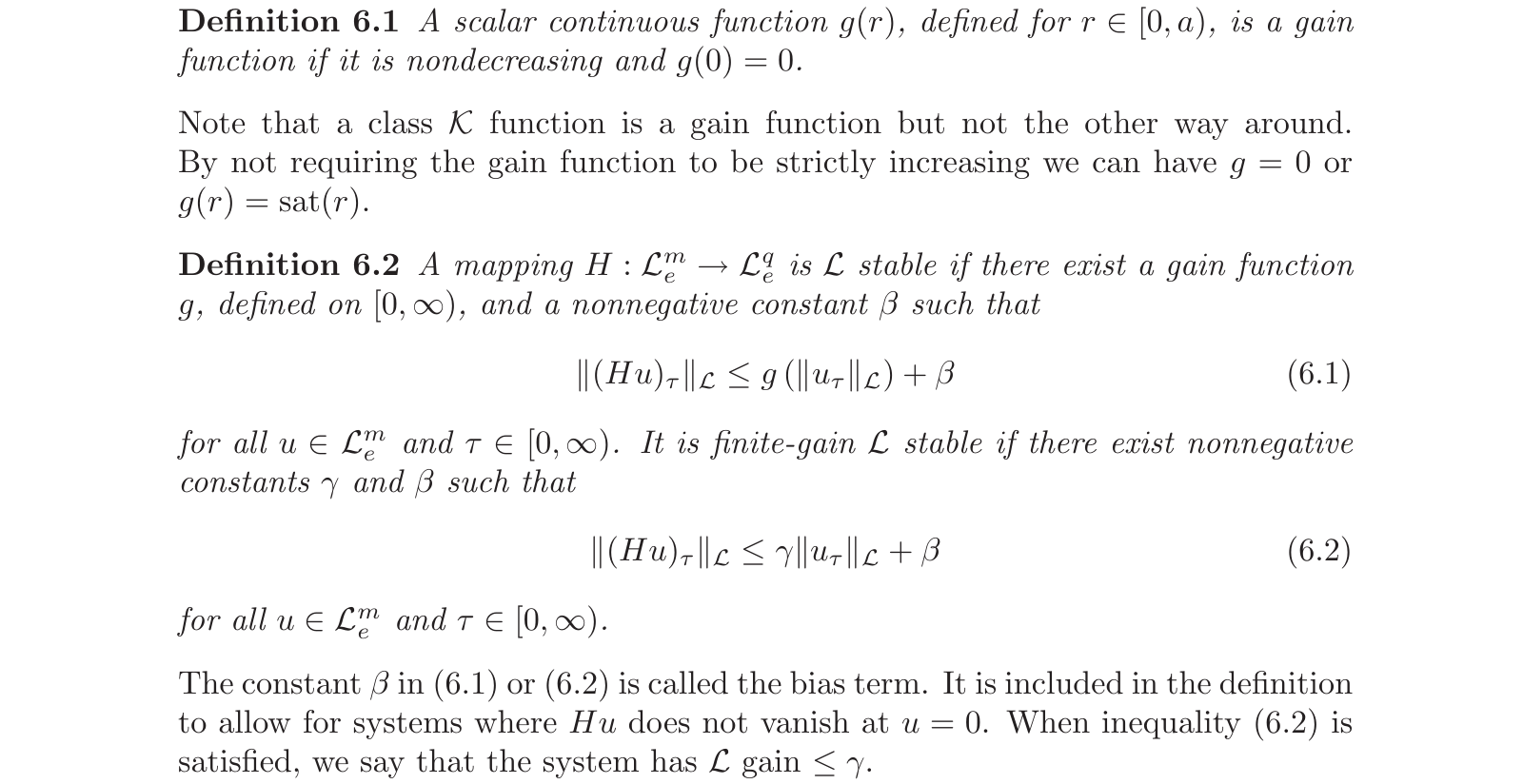 输入输出稳定性定义
输入输出稳定性定义
对于稳定的因果系统,可推得,即输入属于空间,则输出也属于空间。而有限增益稳定性不仅要求输出在空间内,还对输入信号增益有限制。
在讨论不同类型的函数空间(、和)时,有不同的稳定性定义,如稳定性和稳定性,这是由于不同函数空间中的信号特征不同。以空间为例,该空间包含按段光滑有界函数,因此稳定性对应于我们熟悉的有界输入有界输出稳定性(bounded-input-bounded-output
stability)的概念。
上述定义要求不等式对输入空间中的所有信号都成立。对于很多实际系统,输入输出之间的关系只定义在输入空间的一个子集上。于是便催生出了小信号稳定性的概念:
 小信号L稳定性定义
小信号L稳定性定义
小信号稳定性更适合用于分析系统在特定工作点的行为,而稳定性则更适合于分析系统整体或在整个工作范围内的行为。
状态空间模型的稳定性
Lyapunov稳定性侧重于研究平衡点的稳定性以及状态的渐进特性。接下来探讨如何利用Lyapunov稳定性分析工具来建立由状态空间模型表示的非线性系统的稳定性。系统状态空间模型为
稳定性定理体现了与输入到状态稳定(input-to-state
stability)的关系:
 状态空间模型的L稳定性定义
状态空间模型的L稳定性定义
小信号稳定性定理体现了与渐进稳定(asymptotically
stability)的关系:
 状态空间模型的小信号L稳定性定义
状态空间模型的小信号L稳定性定义
增益
稳定性是系统分析中非常重要的概念。因为平方可积信号可以视为能量有限的信号,在实际中很常见。在很多控制问题中,例如控制,系统表示为输入到输出的映射,并希望这个映射尽可能小。对于输入信号,要确保系统输入到输出映射是有限增益稳定,而且努力使增益达到最小。分析这些问题时,不仅要能够判断系统是有限增益稳定的,而且还要计算出增益或者它的上限。
对于线性系统,有如下结论:
 线性系统的L2增益
线性系统的L2增益
从上述定理可知,就是增益,而且它就是的范数。
对于非线性系统,有两个结论。第一个结论与系统的无源性有关:
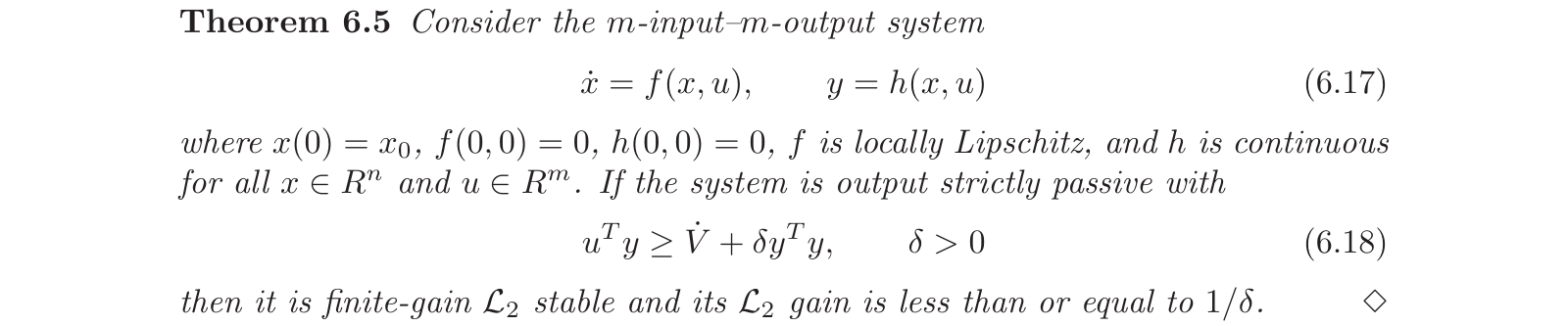 非线性系统的L2增益
非线性系统的L2增益
第二个结论则与所示的Hamilton-Jacobi不等式有关:
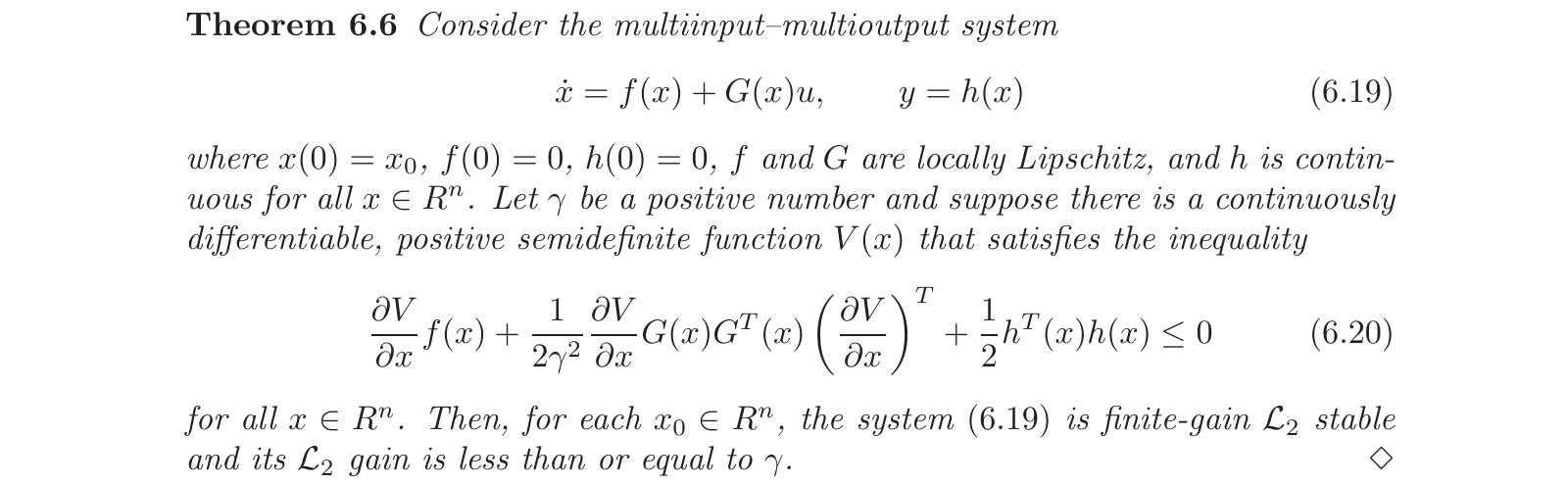 非线性系统的L2增益
非线性系统的L2增益
参考资料
- 非线性控制